Oferujemy systemy do moblinego mapowania na dużą skalę, oparte na otwartym oprogramowaniu.
OPROGRA
MOWANIE
Korzystamy z oprogramowania open-source dostępnego na GitHubie
Oprogramowanie składa się z trzech głównych komponentów:
LiDAR odometry
single-session refinement
multi-session refinement
Previous slide
Next slide
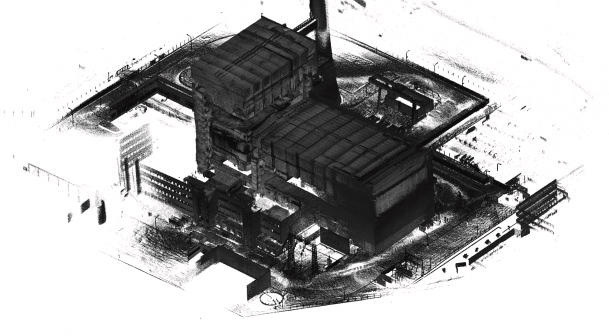
Dane wyrównywane są za pomocą algorytmów SLAM (Simultaneous Localization and Mapping). Wynikiem są chmury punktów 3D w formacie LAZ (skompresowany LAS – LIDAR Aerial Survey).
Oprogramowanie zostało testowane w wielu rzeczywistych scenariuszach:
- mapowanie 3D miast
- dziedzictwo kulturowe
- mapowanie wnętrz na dużą skalę
- tworzenie danych referencyjnych dla robotów mobilnych
- precyzyjna gospodarka leśna
Oprogramowanie działa na maszynach z systemami Linux i Windows, nie wymaga GPU. Zalecane jest użycie co najmniej 32 GB RAM, aby poradzić sobie z dużymi zestawami danych.
Możliwe zastosowania
- dziedzictwo kulturowe
- badania środowiskowe
- geologia
- mapowanie miast
- weryfikacja danych terenowych dla AGV (Automated Guided Vehicle)
- nawigacja mobilnych robotów
- precyzyjne leśnictwo
- robotyka rolnicza
- górnictwo
- edukacja
- rozrywka
- kryminalistyka
- inspekcja infrastruktury krytycznej
- generowanie treści dla cyfrowych bliźniaków
- automatyzacja w budownictwie
- i inne